prendosim.github.io
PrendoSim

PrendoSim is a robot gripper simulator that allows scientists working on robotics to do generate and test viable grasps using a proxy-hand method and a novel grasp stability metric based on the amount of weight that can be withstand. This simulator takes advantage of Unity’s latest NVIDIA PhysX 4.1 integration to create physically realistic grasp simulations and outputs joint pose data of the grippers digits (json format), grasped object’s position, and images of the grasp from a specified point of view in png format.
Code repository: https://github.com/prendosim/prendosim.github.io/
Information about the project has been published in the paper:
Diar Abdlkarim, Valerio Ortenzi, Tommaso Pardi, Maija Filipovica, Alan M. Wing, Katherine J. Kuchenbecker, Massimiliano Di Luca (2021). PrendoSim: Proxy-Hand-Based Robot Grasp Generator, ICINCO 2021 Preprint available here .
Abstract: The synthesis of realistic robot grasps in a simulated environment is pivotal in generating datasets that support sim-to-real transfer learning. In a step toward achieving this goal, we propose PrendoSim, an open-source grasp generator based on a proxy-hand simulation that employs NVIDIA’s physics engine (PhysX) and the recently released articulated-body objects developed by Unity (https://prendosim.github.io). We present the implementation details, the method used to generate grasps, the approach to operationally evaluate stability of the generated grasps, and examples of grasps obtained with two different grippers (a parallel jaw gripper and a three-finger hand) grasping three objects selected from the YCB dataset (hammer, screwdriver, and scissors). Compared to simulators proposed in the literature, PrendoSim balances grasp realism and ease of use, displaying an intuitive interface and enabling the user to produce a large and varied dataset of stable grasps.
Prerequisites
Before you begin, ensure that the following requirements are met:
- You have installed Unity version
2020.1.9f1or higher. - You have a
<Windows/Linux/Mac>machine. - You have read changed Unity’s
Project SettingsandBuild Settingsas stated here:
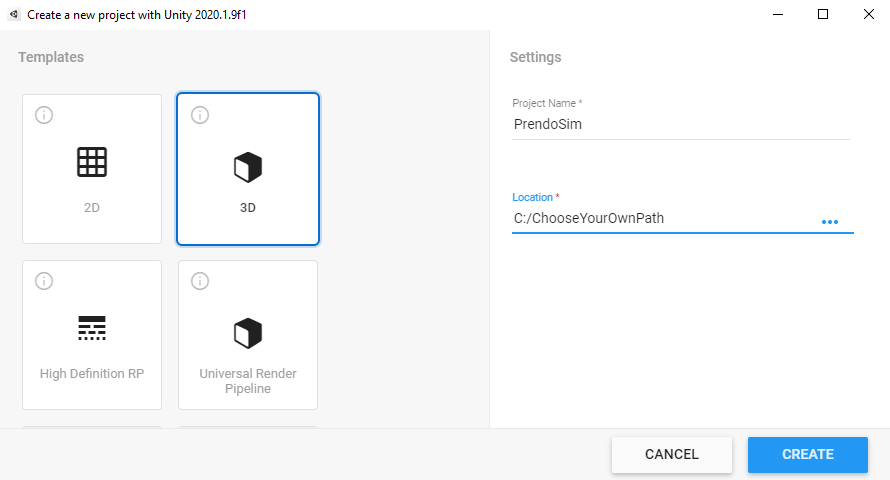
- From Unity Hub 2.4 or higher create a new Unity project with the standard 3D renderer template:
New Unity Project
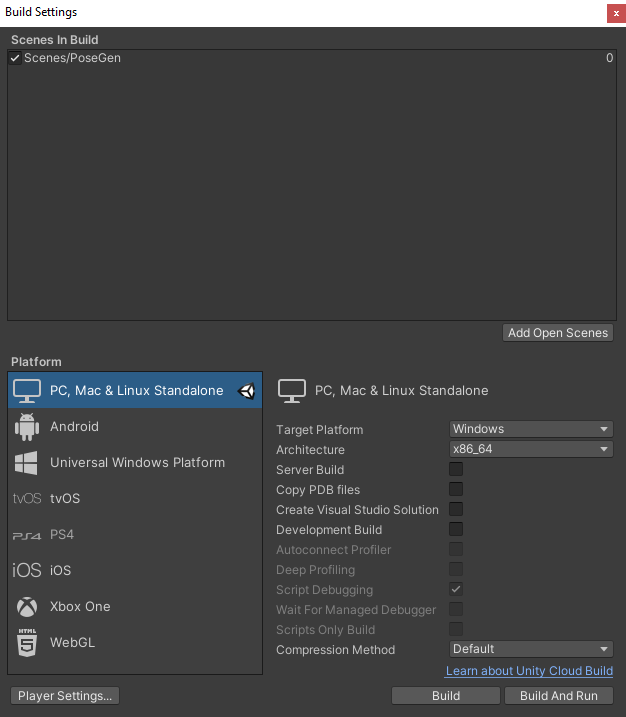
- Under Unity menu bar press
File»Build Settings:
Build Setting
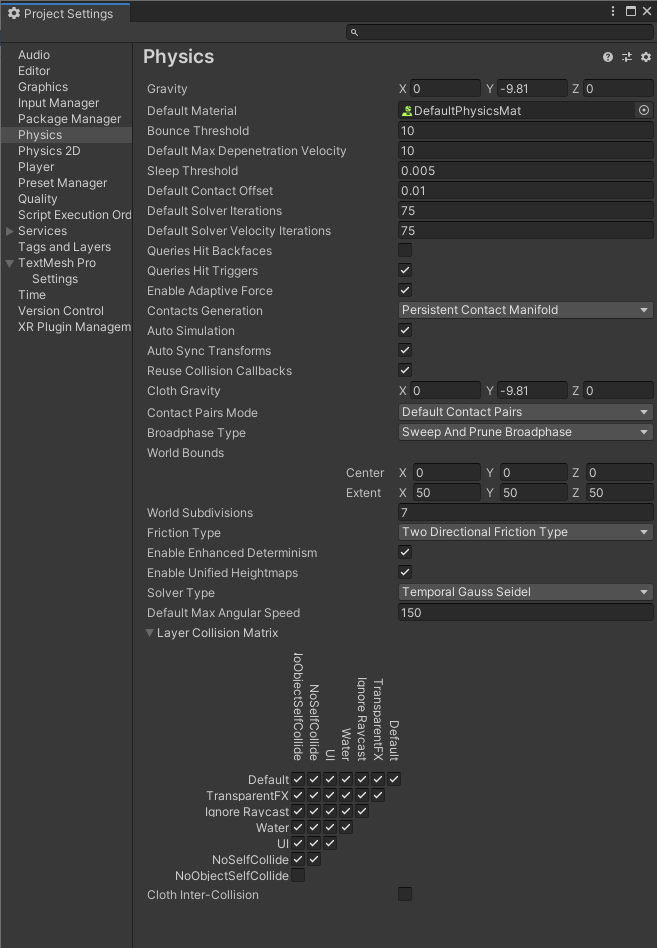
- Under Unity menu bar press
Edit»Project Settingschange the following:
Physics
player

Importing
To use
- Install the PrendoSim Unity package as such:
Linux and macOS:
2. In Unity top menu bar go to `Assets` >> `Import Package` >> `Custom Package` and go to where you have downloaded the `PrendoSim.unitypackage` to.
3. Make sure you import everything.
Windows:
2. In Unity top menu bar go to `Assets` >> `Import Package` >> `Custom Package` and go to where you have downloaded the `PrendoSim.unitypackage` to.
3. Make sure you import everything.
Using
To use
1. Make sure you are in the PoseGen2 scene located in the Scenes folder.
2. Then press the Unity `play` button at the top.
3. You should now be able to select simulation parameter options in the user interface shown on the `Game` window.
Contributing to
To contribute to
- Fork the repository.
- Create a branch:
git checkout -b <branch_name>. - Make your changes and commit them:
git commit -m '<commit_message>' - Push to the original branch:
git push origin <project_name>/<location> - Create the pull request.
Alternatively see the GitHub documentation on creating a pull request.
You ontributors.org/docs/en/emoji-key).
Contact
If you want to contact me, you can reach me at diarkarim@gmail.com.
License
This project uses the following license: MIT License .